バイオロボティクス研究室が栽培管理ロボットの研究開発を開始 ~変化自在のバックパック「ランドセル」システムで「農型スマートグリーンシティ」構築を目指す~
2026年4月20日
教育・学術
Nexus Agri-Food Tech
「農型スマートグリーンシティプロジェクト」始動!
東京農業大学 バイオロボティクス研究室は、「農型スマートグリーンシティ」の構築を目指し、モデル作物であるワインブドウを対象とした栽培管理ロボットの研究開発を開始いたしました。
■プロジェクト背景
本プロジェクトでは、都市部に増え続ける空き店舗やビルの屋上を活用し、農空間へと再生させる「農型スマートグリーンシティ」の実現を提唱しています。 どこでも栽培を可能にする「ポッド方式」を採用し、4足歩行ロボットが縦横無尽に駆け巡る、次世代の都市農業モデルを構築します。
■開発の核:変化自在のバックパック「ランドセル」システム
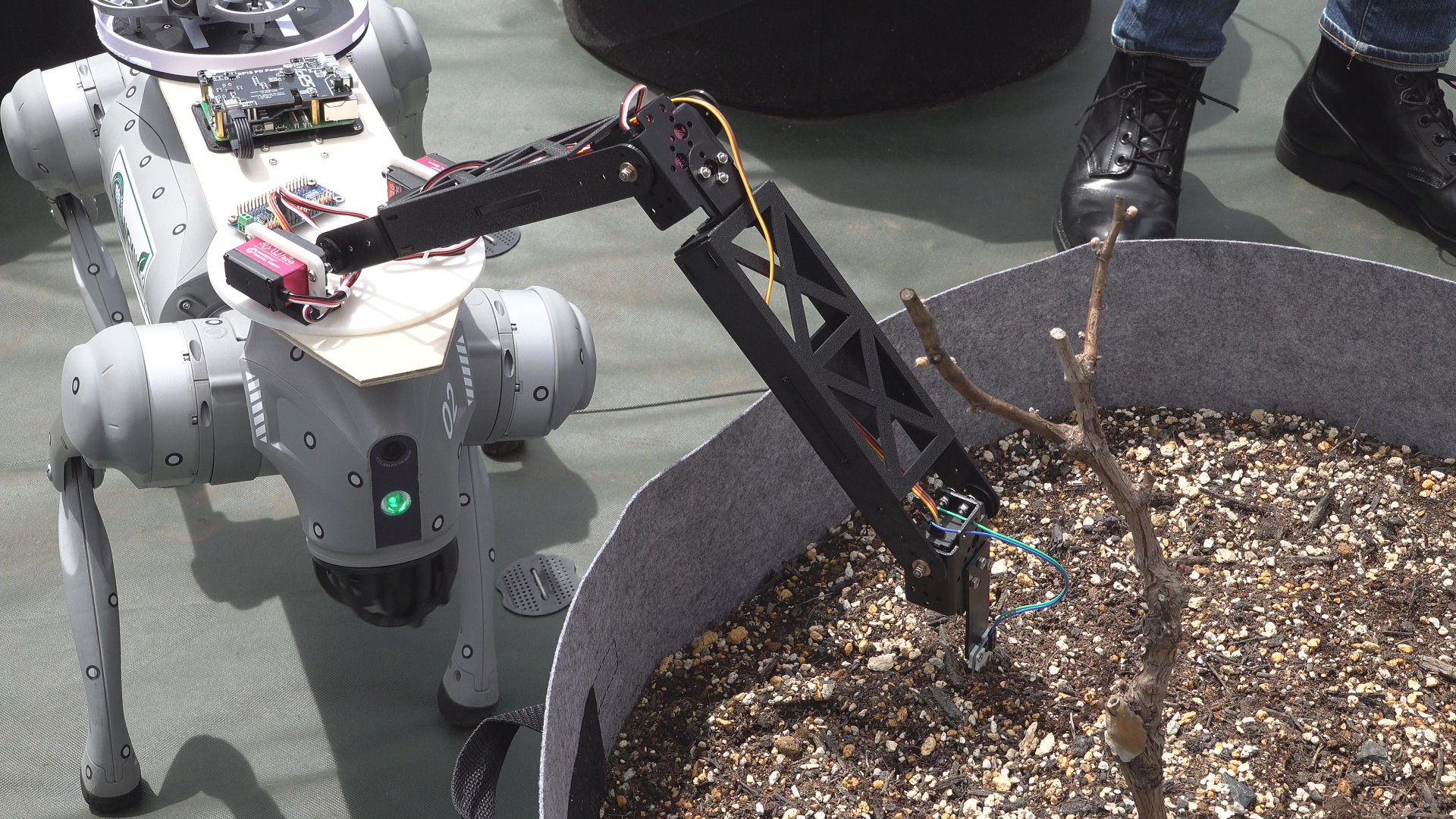
今回、栽培管理のベースとして開発されたのは4足歩行ロボットの背中に、アームロボット、制御マイコン、ドローンポートを集約した栽培管理特化型ユニットです。 私たちはこれを「ランドセル」と命名し、用途に合わせて背負い直すことで、多様なミッションをこなす仕様を目指しています。
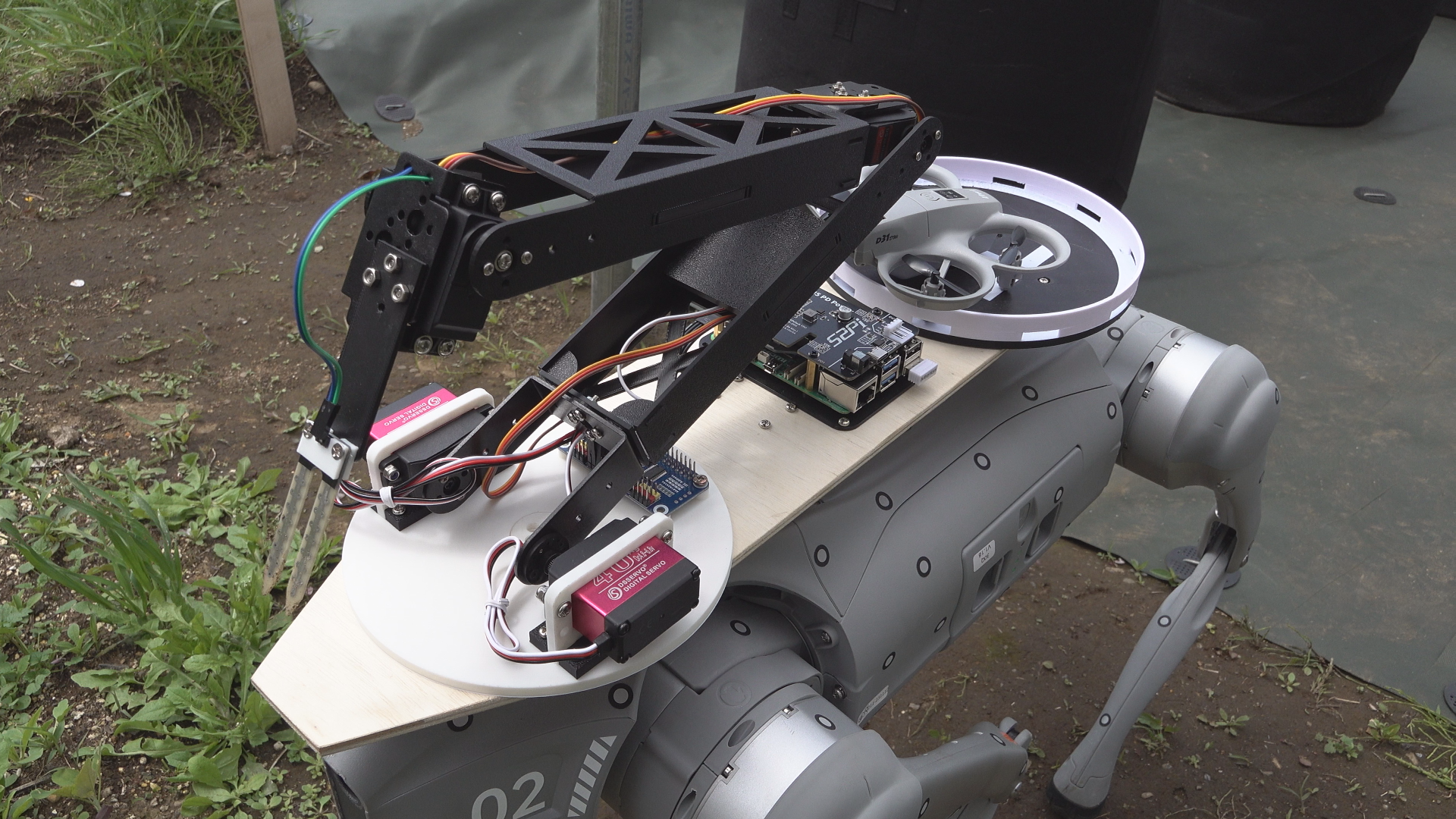
- ・多角的なデータ収集 : ロボットアーム先端の土壌水分センサーやサーモカメラに加え、搭載ドローンが空から生育状況を把握します。
- ・「ランドセル」の展開 : 今後は「獣害対策用ランドセル」や「播種(種まき)用ランドセル」など、シーンに合わせたラインナップを拡充予定です。
■今後の展望:群制御による完全自動化への挑戦
今後は、株式会社ミライト・ワン・システムズと共同で、4足歩行ロボットの「自律走行」および、複数台の機器による「群制御」の研究開発を加速させます。 まずは東京農業大学世田谷キャンパス内の圃場で精度を高め、近い将来、都市の屋上や空き店舗での実証実験を通じて、世界に類を見ない「農型スマートグリーンシティ」を実現してまいります。

